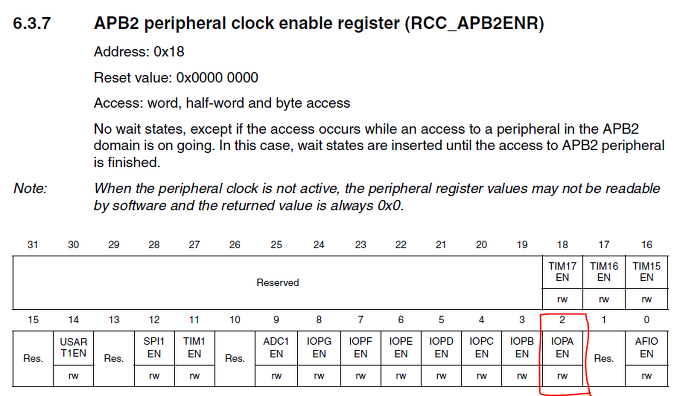
내가 AVR(ATmega시리즈)을 배울때는 데이터시트 띄어놓고 레지스터보면서 코드를 짰지만 STM32 이놈은..... 너무 많다.... 난 항상 새로운걸 배울땐 무지에서 오는 귀찮음 때문에 진도가 안나간다... 친구는 그렇게 하지말고 예제를 보며 역추적하라고 해서 그 방법을 적용해볼까 한다. 먼저 코드부터 살펴봅시다~~ #include "stm32f10x.h" void init_port() { GPIO_InitTypeDef PORTA; GPIO_InitTypeDef PORTB; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB, ENABLE); PORTA.GPIO_Pin = 0x0001; PORTA.GPIO_Mode = GPIO_Mod..